已更新 23 Mar 2026
在無人機測繪任務中,真正困難的往往不是飛行,而是「資料是否完整且可用」。多數作業流程仍停留在任務結束後才進行建模與檢查,一旦發現缺漏,就必須回場補拍,造成時間與成本浪費。Skydio X10 透過機載運算與 Spatial AI,將 3D 建模推進至現場即時驗證的階段,讓操作人員能在任務當下確認成果可用性。本文將從四種掃描模式的應用脈絡出發,說明其如何重新定義測繪流程,並讓無人機從資料採集工具,進一步成為具備現場判讀能力的決策支援系統。
📑 目錄|Table of Contents
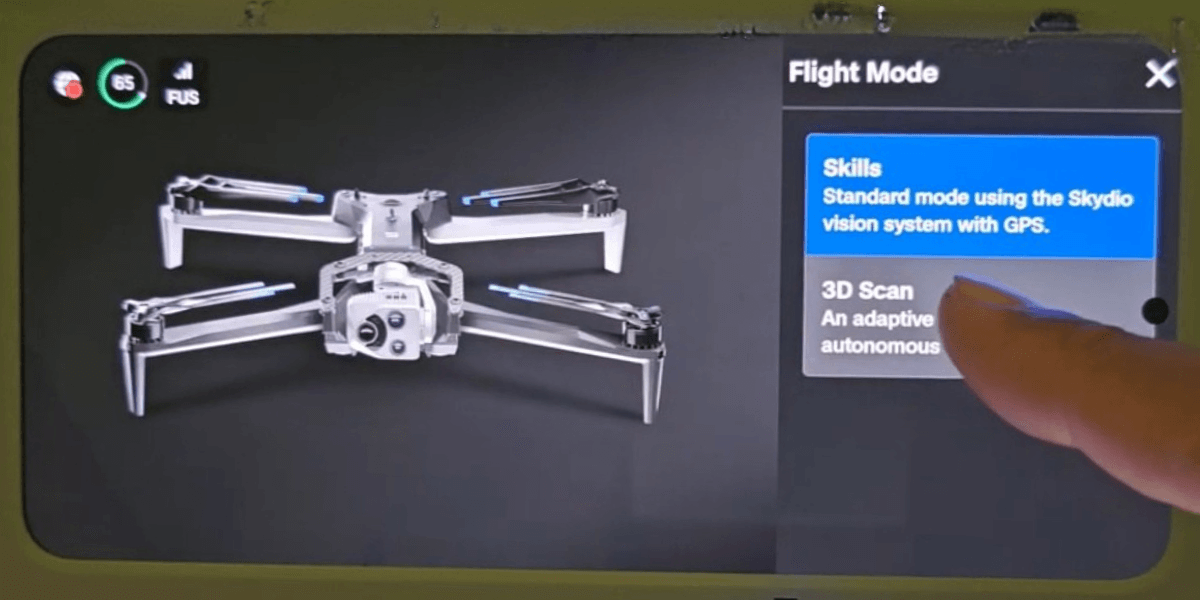
雖然 Skydio X2 已具備卓越的自主飛行與 360° 全向避障能力,但 Skydio X10 透過硬體架構的代際革新,進一步強化了在極端環境下的作業韌性與資料即時性:
| 比較項目 | Skydio X2 (3D Scan) | Skydio X10 (Spatial AI) |
|---|---|---|
| 運算架構 | NVIDIA Tegra X2 | NVIDIA Jetson Orin (運算效能為NVIDIA Tegra X2至少10倍以上) |
| 導航模式 | 視覺導航為主(高空/越水需依賴 GPS) | 全時視覺導航 (VIO)(支援全高度/越水作業) |
| 夜間作業 | 支援 GPS 夜間飛行(需強制關閉避障) | NightSense 夜間自主飛行(全黑仍維持全向避障) |
| 避障距離 | 360° 全向避障(極限近距離 ~8cm) | 360° 全向避障(精準近距離作業 ~15cm) |
| 數據驗證 | 需離線匯出後處理方能確認模型 | 機上即時 3D 覆蓋建模,提供現場 100% 採集驗證 |
| 任務定位 | 自適應自主掃描工具 | 即時決策支援系統 |
核心差異點:若說 X2 解決了「如何拍」,那麼 X10 則徹底解決了「拍完現場能不能用」的效率問題。
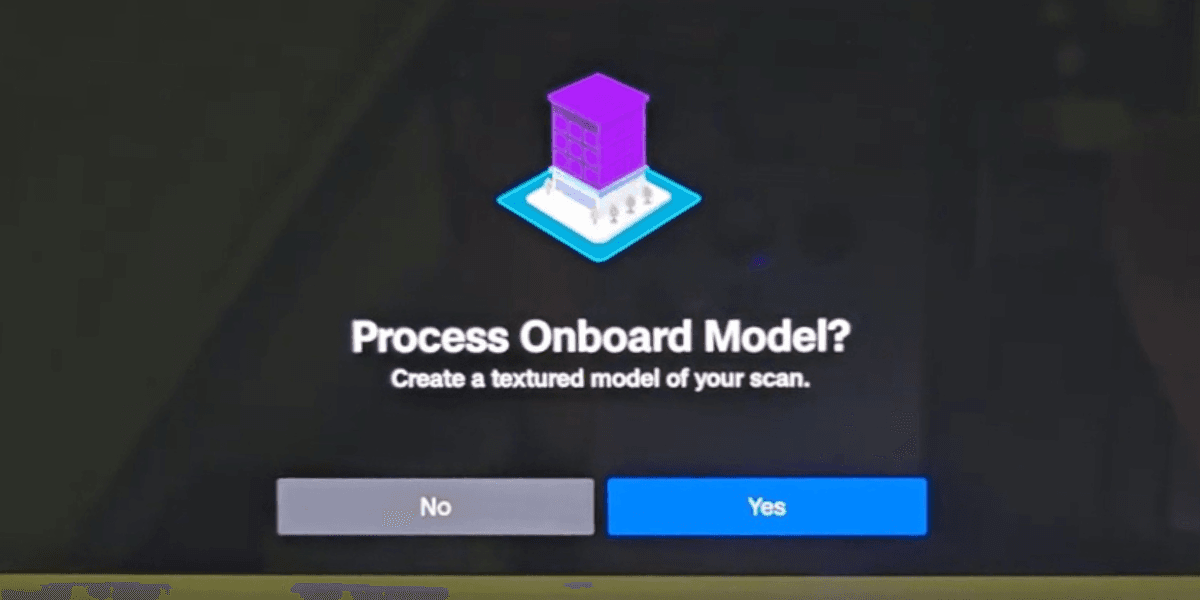
傳統測繪流程常因現場遮蔽或訊號干擾,導致回到辦公室建模時才發現資料缺漏。Skydio X10 機載運算的功能改變了工作流程:
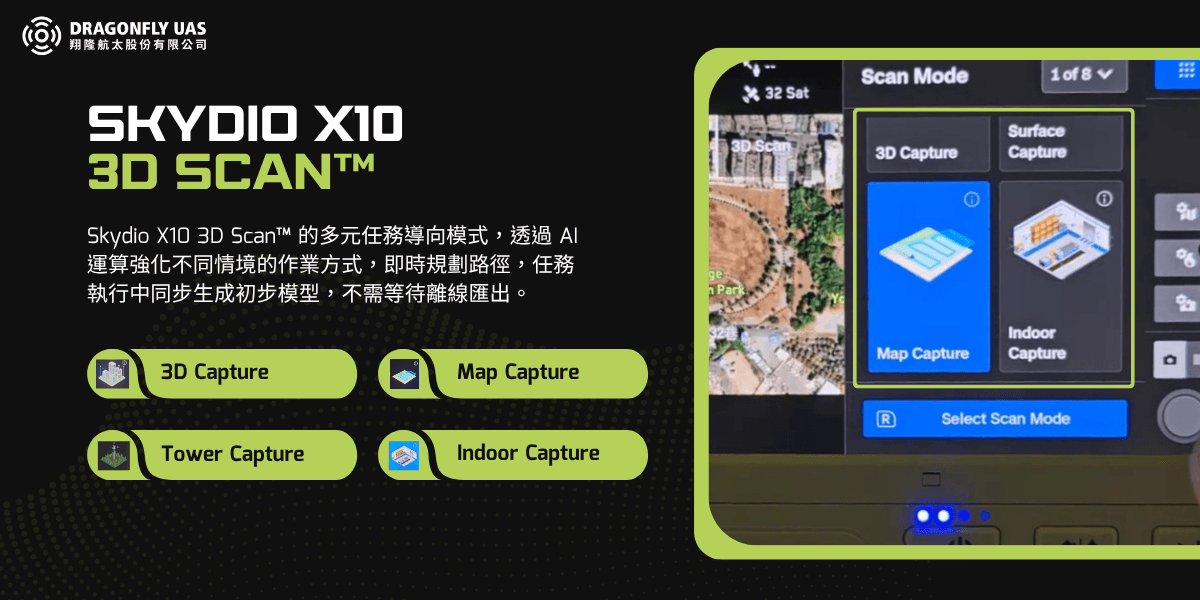
Skydio X10 完整支援 3D Scan™ 的多元任務導向模式,並透過 AI 運算強化了在不同情境的作業方式,賦予其更強大的環境適應力:
自動計算掃描體積與覆蓋率,特別適用於橋梁結構、古蹟保存與大型建築巡檢。得益於 15cm 的超近距離避障能力,無人機能深入死角,捕捉最高解析度的表面細節。
針對鐵路、工地及河川整治,提供 Orthomosaic 正射影像與 DTM/DSM 產製。即便在峽谷或 GPS 弱訊號環境下,其廣角鏡頭與視覺導航技術仍能確保採集效率與航線重疊度。
針對電塔、通訊塔等圓柱型垂直結構進行優化。系統能精確規劃垂直掃描路徑,減少無效飛行時間,並大幅提升高壓電環境下的自主作業安全性。
不依賴任何衛星訊號,憑藉 Visual Navigator (VIO) 視覺慣性里程計,X10 能在工廠內部、倉庫或地下空間自主導引,產出完整的室內 3D 空間數據。
X10 的突破不僅在於飛行技術,更在於數據生成的即時性與後續管理:
為了對應關鍵基礎設施的高標準需求,Skydio X10 具備以下核心競爭力:
Skydio X10 的真正價值,在於縮短了資料從「採集」到「可用」的距離。當 3D 建模能夠在現場即時驗證與理解時,無人機的角色已從紀錄工具,進化為支撐工程管理與應變調度的核心決策基礎。
A:Skydio X10 透過機載即時建模與現場覆蓋率驗證,讓操作員在任務執行中即可確認資料完整性,避免回場後才發現缺漏。
A:X2 側重於自動化掃描流程,而 X10 則進一步提供即時建模與現場驗證能力,讓資料在拍攝完成當下即可確認是否可用。
A:Skydio X10 透過 Visual Navigator(VIO)技術,即使在室內或 GPS 訊號中斷的環境中,仍可穩定飛行並完成 3D 建模。
A:透過 NightSense 夜間自主飛行功能,Skydio X10 在低光甚至全黑環境下仍能維持避障與導航能力。
A:不需要,X10 支援機載建模功能,任務完成即可在現場取得初步 3D 模型。
👉 想了解更多關於 Skydio X10 3D Scan™ 實務導入方案?
點我聯繫翔隆航太
點我了解 Skydio X10 更多細節
📞 立即預約專人諮詢
TEL:02-2718-3421
📧 Email:[email protected]


 吳東諺 翔隆航太 設施巡檢處 處長
吳東諺 翔隆航太 設施巡檢處 處長







 EN
EN